
HTS-AHRS-67 Attitude and Heading Reference System consists of a MEMS inertial measurement unit, a heading attitude algorithm and a complementary filtering algorithm. The system uses MEMS device temperature error compensation technology and complementary filtering algorithms to maintain attitude accuracy for a long time and output stable and reliable heading attitude information in a dynamic environment.
The HTS-AHRS-67 Attitude and Heading Reference System is MEMS based inertial system designed to provide accurate orientation and motion data in dynamic environments. The system uses advanced sensor fusion algorithms, combined with accelerometers, gyroscopes and magnetometers, to provide accurate real-time attitude, heading and angular rate measurements. Which is an ideal solution for aviation, marine, robotics and unmanned system applications.
With high accuracy and low lag of the HTS-AHRS-67, it ensures optimal performance even under demanding conditions. The system is able to compensate for external disturbances (such as magnetic interference) and provides strong temperature stability, making it suitable for use in a wide range of industries.
Features:
• Pitch/ Roll Angle Accuracy: static 0.2°, dynamic 0.3°
• High Stability & Reliability, High Survivability
• Range: Gyro ±500°/s, Accelerometer ±10g
• Compact size, low weight, easy installation
• Customized service provided
Performance Characteristics
|
Speci |
Unit |
Model |
|
|
HTS-AHRS-67 |
|||
|
Heading angle drift (initial value 0°, RMS) |
°/h |
72 |
|
|
Pitch angle accuracy / Roll angle accuracy (RMS) |
° |
Static 0.2 |
|
|
° |
Dynamic 0.3 |
||
|
Gyro |
Range |
°/s |
±500 |
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
10 |
|
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
°/h |
60 |
|
|
Bias repeatability |
°/h |
20 |
|
|
Random walk |
°/√h |
0.5 |
|
|
Cross coupling |
% |
0.2 |
|
|
Accelerometer |
Range |
g |
±10 |
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.05 |
|
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
mg |
2 |
|
|
Bias repeatability |
mg |
0.2 |
|
|
Cross coupling |
% |
0.1 |
|
|
Data update rate |
Hz |
500 (customizable) |
|
|
Votage |
V |
5±0.25 |
|
|
Power consumption |
W |
0.4 |
|
|
Operating temperature |
℃ |
-45~+80 |
|
|
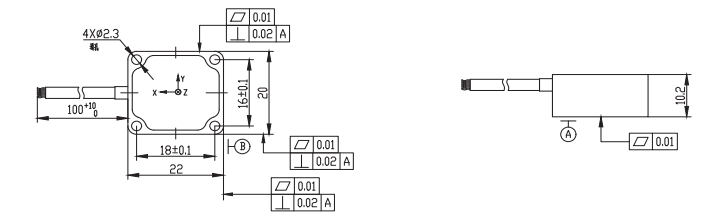
Dimension |
mm |
20*20*10.2 |
|
|
Weight |
g |
12 |
|
|
Interface |
______ |
RS-422 |
|
Dimension & Drawing