
The HTS-IMU4 Inertial measurement unit is a small, non-GPS-aided inertial measurement unit weighing only 55 grams. It is suitable for a variety of commercial and military guidance and navigation applications. It has the same gyro performance as the HTS-E3/1A gyroscope module (alternative STIM210 Sensonor) and an accelerometer zero bias repeatability of less than 0.2 mg. The HTS-IMU4 inertial measurement unit has 3 built-in inclinometers to ensure accurate system leveling and provides an external synchronization signal input. The IMU (inertial measurement unit) is temperature compensated over a wide operating range, and all axes are mechanically and electrically aligned relative to the package reference plane. The HTS-IMU4 inertial measurement unit is not sensitive to magnetic fields. For higher-priced and heavier FOG-based inertial measurment systems, it is a relatively reliable, cost-effective inertial measurement unit. Its output format, sampling rate, filter settings, and data packet content can be set by the customer.
Features: Applications:
• Three-axis gyro zero bias instability is 0.05°/h • Inertial navigation research and production
• Three-axis gyro angle random walk is 0.02°/√h • Guidance and control system
• Three-axis accelerometer zero bias repeatability is 0.2mg • Mobile mapping platform attitude measurement
• Three-axis accelerometer range can be selected 10g/40g/80g • Unmanned equipment control
• Built-in inclinometer and 24-bit analog-to-digital conversion • Attitude measurement and control
• Support external trigger input
Performance Characteristics
|
Speci |
Unit |
Model |
|||||
|
HTS-IMU4 |
HTS-IMU4A |
HTS-IMU4B |
HTS-IMU4C |
HTS-IMU4F |
|||
|
Gyro |
Range (customizable) |
°/s |
±400 |
±400 |
±400 |
±2000 |
±300 |
|
Zero bias |
°/h |
15 |
10 |
5 |
30 |
3 |
|
|
Bias instability (@Allan error) |
°/h |
0.3 |
0.1 |
0.05 |
1 |
0.05 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
3 |
2 |
0.4 |
6 |
0.2 |
|
|
Bias repeatability |
°/h |
3 |
1 |
0.3 |
3 |
0.2 |
|
|
Bias error within full temperature range |
°/h |
20 |
10 |
2 |
30 |
1 |
|
|
Random walk |
°/√h |
0.15 |
0.05 |
0.02 |
0.3 |
0.02 |
|
|
Bias acceleration sensitivity |
°/h/g |
2 |
2 |
2 |
2 |
1 |
|
|
Resolution |
°/h |
2 |
1 |
0.5 |
5 |
2 |
|
|
Output noise (half peak) |
°/s |
0.3 |
0.25 |
0.15 |
0.45 |
0.03 |
|
|
Bandwidth |
Hz |
125 |
100 |
||||
|
Scale factor non-linearity |
ppm |
100 |
|||||
|
Scale factor repeatability |
ppm |
100 |
|||||
|
Cross coupling |
% |
0.1 |
|||||
|
Speci |
Unit |
I Type |
II Type |
III Type |
IV Type |
|
|
Accelerometer |
Range (customizable) |
g |
±10 |
±40 |
±80 |
±10 |
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.05 |
0.2 |
1 |
0.05 |
|
|
Bias repeatability |
mg |
0.2 |
1 |
0.5 |
0.3 |
|
|
Bias error within full temperature range |
mg |
2 |
2 |
5 |
1 |
|
|
Resolution |
mg |
0.1 |
||||
|
Bandwidth |
Hz |
125 |
100 |
|||
|
Scale factor non-linearity |
ppm |
500 |
||||
|
Scale factor repeatability |
ppm |
500 |
||||
|
Cross coupling |
% |
0.1 |
||||
|
Speci |
Unit |
Standard Type |
||
|
Inclinometer |
Range (customizable) |
g |
±1.7 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.5 |
||
|
Scale factory non-linearity |
ppm |
500 |
||
|
Others |
Stable start time |
s |
1 |
|
|
Data rate |
Hz |
1000 |
||
|
Voltage |
V |
5±0.5 |
||
|
Steady state power consumption |
W |
1.5 |
||
|
Ripple |
mV |
100 |
||
|
Working temperature |
℃ |
-45~85 |
-55~85 |
|
|
Storage temperature |
℃ |
-55~105 |
-55~105 |
|
|
Weight |
g |
55±5 |
||
|
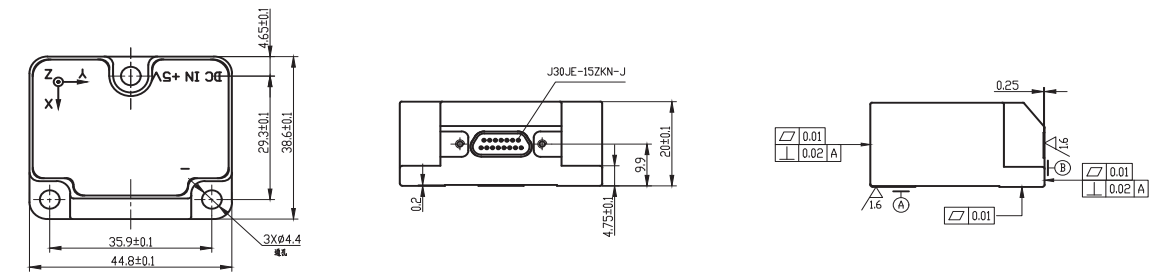
Size |
mm |
44.8×38.6×20 |
||
|
Interface |
—— |
RS-422 |
||
Dimension and Drawing