
The HTS-IMU7 MEMS Based Inertial Measurement Unit is a high peformance, affordable, non-GPS-aided inertial measurement unit, which consists of cost-effective MEMS gyrocope chip and MEMS accelerometer chip, its drive pickup circuit, temperature sensor, digital signal processing circuit, a structure and software, etc. It’s used to measure three-axis angular velocity and three-axis acceleration of the carrier in real time. This IMU uses flexible connection technology, built-in full temperature compensation, installation misalignment angle compensation, nonlinear compensation and other compensation algorithms, and can output stable and reliable measurement data for users after error compensation under static, dynamic and harsh conditions.
Features: Applications:
• Three-axis gyro zero bias instability is 5°/h • Inertial navigation research and production
• Three-axis gyro angle random walk is 0.5°/√h • Guidance and control system
• Three-axis accelerometer zero bias repeatability is 0.2mg • Mobile mapping platform attitude measurement
• Three-axis accelerometer range can be selected 10g/20g/50g • Unmanned equipment control
• Gyro range up to 4000 °/s • Attitude measurement and control
• Customized service provided
Performance Characteristics
|
Speci |
Unit |
Model |
|||||
|
HTS-IMU6 |
HTS-IMU6A |
HTS-IMU6B |
HTS-IMU6C |
HTS-IMU6F |
|||
|
Gyro |
Range (customizable) |
°/s |
±400 |
±400 |
±400 |
±2000 |
±400 |
|
Zero bias |
°/h |
15 |
10 |
5 |
30 |
3 |
|
|
Bias instability (@Allan error) |
°/h |
0.3 |
0.1 |
0.05 |
1 |
0.03 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
3 |
2 |
0.4 |
6 |
0.2 |
|
|
Bias repeatability |
°/h |
3 |
1 |
0.3 |
3 |
0.1 |
|
|
Bias error within full temperature range |
°/h |
20 |
10 |
2 |
30 |
1 |
|
|
Random walk |
°/√h |
0.15 |
0.05 |
0.02 |
0.3 |
0.01 |
|
|
Bias acceleration sensitivity |
°/h/g |
2 |
2 |
2 |
2 |
2 |
|
|
Resolution |
°/h |
2 |
1 |
0.5 |
5 |
0.3 |
|
|
Output noise (half peak) |
°/s |
0.3 |
0.25 |
0.15 |
0.45 |
0.15 |
|
|
Bandwidth |
Hz |
125 |
100 |
||||
|
Scale factor non-linearity |
ppm |
100 |
|||||
|
Scale factor repeatability |
ppm |
100 |
|||||
|
Cross coupling |
% |
0.1 |
|||||
|
Speci |
Unit |
I Type |
II Type |
III Type |
|
|
Accelerometer |
Range (customizable) |
g |
±10 |
±20 |
±40 |
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.05 |
0.1 |
0.2 |
|
|
Bias repeatability |
mg |
0.2 |
0.5 |
1 |
|
|
Bias error within full temperature range |
mg |
2 |
2 |
2 |
|
|
Resolution |
mg |
0.1 |
|||
|
Bandwidth |
Hz |
100 |
|||
|
Scale factor non-linearity |
ppm |
500 |
|||
|
Scale factor repeatability |
ppm |
500 |
|||
|
Cross coupling |
% |
0.1 |
|||
|
Speci |
Unit |
Standard Type |
|
|
Others |
Stable start time |
s |
1 |
|
Data rate |
Hz |
1000 |
|
|
Voltage |
V |
5±0.25 |
|
|
Steady state power consumption |
W |
≤0.4 |
|
|
Ripple |
mV |
100 |
|
|
Working temperature |
℃ |
-45~85 |
|
|
Storage temperature |
℃ |
-55~105 |
|
|
Weight |
g |
12 |
|
|
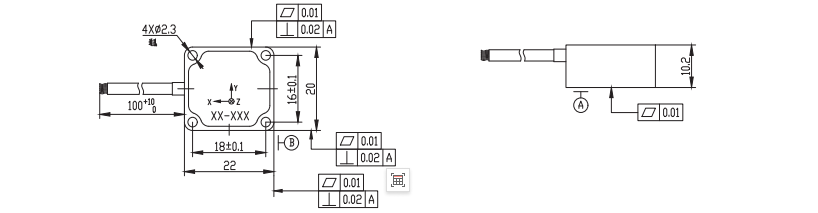
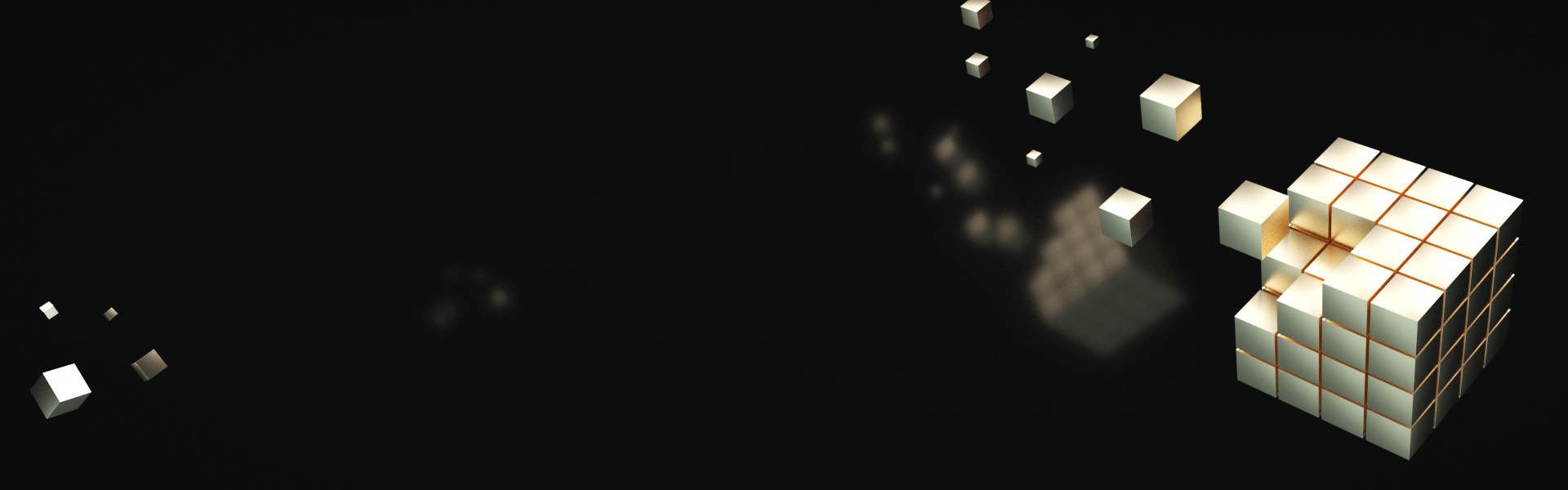
Size |
mm |
22×20×10.2 |
|
|
Interface |
—— |
RS-422 |
|
Dimension and Drawing