HTS-IMU-LP1 Inertial Measurement Unit is a small, tactical grade, six degrees of freedom inertial measurement unit, which is a completely inertial systems that includes a triaxial gyroscope and a triaxial accelerometer. This IMU uses flexible connection technology, built-in full temperature compensation, installation misalignment angle compensation, nonlinear compensation and other compensation algorithms, and can output stable and reliable measurement data for users after error compensation under static, dynamic and harsh conditions.
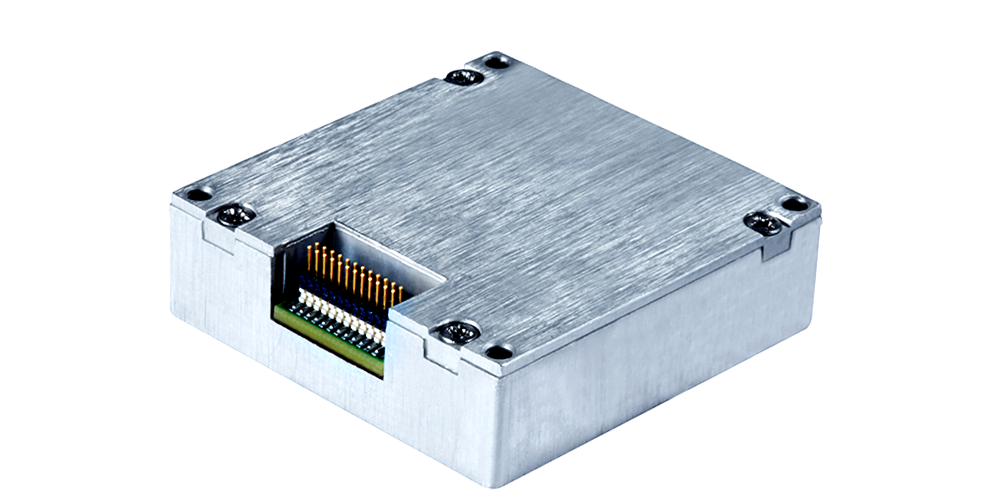
HTS-IMU-LP1 Inertial Measurement Unit provides a simple, cost-effective method to integrate accurate multi-axis inertial sensing into industrial systems, especially when compared with the complexity and investment associated with discrete designs. The HTS-IMU-LP1 inertial measurement unit is housed in an aluminum package that measures approximately 47 mm × 44 mm × 14 mm and includes a standard connector interface.
Features:
Triaxial, digital gyroscope, ±450°/sec dynamic range
±0.05° orthogonal alignment error,0.3°/hr in-run bias stability ,0.15°/√hr angular random walk, 0.02% nonlinearity,
1°/h bias repeatability, 20°/h bias error over temperature
Triaxial, digital accelerometer, ±20 g and up to ±40 g (customized)
Triaxial, delta angle and delta velocity outputs
Factory-calibrated sensitivity, bias, and axial alignment
Operating and calibration temperature range: −45°C to +85°C
SPI-compatible serial interface
Programmable operation and control
4 FIR filter banks, 120 configurable taps
Digital input/output: data-ready alarm indicator, optional external sample clock up to 3.2 kHz
Single-supply operation: 3.0 V to 3.6 V
1500 g shock (operating), 10000 g shock (survival)
Performance Characteristics
TC = 25°C, VDD
= 3.3 V, angular rate = 0°/sec, dynamic range = ±450°/sec , ± 1 g, unless
otherwise noted.
|
Parameter |
Test Conditions/Comments |
Min Typ Max |
Unit |
|
GYROSCOPES |
|
|
|
|
Dynamic Range |
|
±450 ±480 |
°/sec |
|
Sensitivity |
x_GYRO_OUT and x_GYRO_LOW (32-bit) |
2621440 |
LSB/°/sec |
|
Repeatability1 |
−45°C ≤ TC ≤ +85°C |
0.01 |
% |
|
Sensitivity Temperature Coefficient |
−45°C ≤ TC ≤ +85°C, 1 σ |
±10 |
ppm/°C |
|
Misalignment |
Axis to axis |
±0.05 |
Degrees |
|
Axis to frame (package) |
±0.05 |
Degrees |
|
|
Nonlinearity |
Best fit straight line, FS = 450°/sec |
0.02 |
% of FS |
|
Bias Repeatability1, 2 |
−45°C ≤ TC ≤ +85°C, 1 σ |
1 |
°/h |
|
In-Run Bias Stability |
1 σ, Allan |
0.3 |
°/h |
|
Angular Random Walk |
1 σ |
0.15 |
°/√h |
|
Bias Temperature Coefficient |
−45°C ≤ TC ≤ +85°C, 1 σ |
±0.15 |
°/h/°C |
|
Linear Acceleration Effect on Bias |
Any axis, 1 σ |
1 |
°/h/g |
|
Output Noise |
No filtering |
0.05 |
°/sec rms |
|
Rate Noise Density |
f = 10 Hz to 40 Hz, no filtering |
0.002 |
°/sec/√Hz rms |
|
3 dB Bandwidth |
|
250 |
Hz |
|
Sensor Resonant Frequency |
|
12 |
kHz |
|
ACCELEROMETERS |
Each axis |
|
|
|
Dynamic Range |
Up to ±40(customized) |
±20 |
g |
|
Sensitivity |
x_ACCL_OUT and x_ACCL_LOW (32-bit) |
65536000 |
LSB /g |
|
Repeatability1 |
−45°C ≤ TC ≤ +85°C |
±0.02 |
% |
|
Sensitivity Temperature Coefficient |
−45°C ≤ TC ≤ +85°C, 1 σ |
±5 |
ppm/°C |
|
Misalignment |
Axis to axis |
±0.05 |
Degrees |
|
Axis to frame (package) |
±0.05 |
Degrees |
|
|
Nonlinearity |
Best fit straight line, ±20 g |
0.05 |
% of FS |
|
Bias Repeatability1, 2, 3 |
−45°C ≤ TC ≤ +85°C, 1 σ |
5 |
mg |
|
In-Run Bias Stability |
1 σ |
10 |
ug |
|
Velocity Random Walk |
1 σ |
0.05 |
m/sec/√hr |
|
Bias Temperature Coefficient |
−45°C ≤ TC ≤ +85°C |
±0.025 |
mg/°C |
|
Output Noise |
No filtering |
1 |
mg rms |
|
Noise Density |
f = 10 Hz to 40 Hz, no filtering |
40 |
ug/√Hz rms |
|
3 dB Bandwidth |
|
250 |
Hz |
|
Sensor Resonant Frequency |
|
2.5 |
kHz |
|
TEMPERATURE SENSOR |
|
|
|
|
Scale Factor |
Output = 0x0000 at 25°C (±5°C) |
0.0125 |
°C/LSB |
|
LOGIC INPUTS6 |
|
|
|
|
Input High Voltage, VIH |
|
2.0 |
V |
|
Parameter |
Test Conditions/Comments |
Min Typ Max |
Unit |
|
Input Low Voltage, VIL |
|
0.8 |
V |
|
Logic 1 Input Current, IIH |
VIH = 3.3 V |
10 |
µA |
|
Logic 0 Input Current, IIL |
VIL =0 V |
|
|
|
All Pins Except RST and CS |
|
10 |
µA |
|
RST and CS Pins7 |
|
0.33 |
mA |
|
Input Capacitance, CIN |
|
10 |
pF |
|
DIGITAL OUTPUTS |
|
|
|
|
Output High Voltage, VOH |
ISOURCE = 0.5 mA |
2.4 |
V |
|
Output Low Voltage, VOL |
ISINK = 2.0 mA |
0.4 |
V |
|
FLASH MEMORY |
Endurance8 |
100,000 |
Cycles |
|
Data Retention9 |
TJ = 85°C |
20 |
Years |
|
FUNCTIONAL TIMES10 |
Time until data is available |
|
|
|
Power-On Start-Up Time |
|
1000 |
ms |
|
Reset Recovery Time11 |
|
500 |
ms |
|
Flash Memory |
|
|
|
|
Update Time |
|
375 |
ms |
|
Test Time |
|
50 |
ms |
|
CONVERSION RATE |
|
3.2 |
kSPS |
|
Initial Clock Accuracy |
|
0.01 |
% |
|
Temperature Coefficient |
|
20 |
ppm/°C |
|
Sync Input Clock |
|
0.712 2.4 |
kHz |
|
POWER SUPPLY, VDD Power Supply Current13 |
Operating voltage range Normal mode, VDD = 3.3 V, µ ± σ |
3.0 3.6 300 |
V mA |
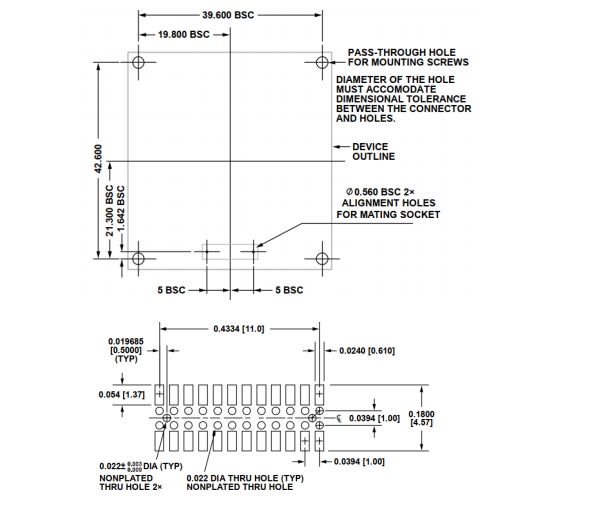
Dimension and Drawing